Никола Тесла - Лекции
Здесь есть возможность читать онлайн «Никола Тесла - Лекции» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Прочая документальная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Лекции
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Лекции: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Лекции»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Потрясающие природные данные, неугасимое стремление к знаниям, живой интерес ко всему, чем так богат мир, постоянное самосовершенствование сделали из Николы Теслы уникальную личность, чей изобретательский талант и провидческие идеи еще предстоит по-настоящему оценить будущим поколениям. Лекции и речи читаются с большим интересом, поскольку дают возможность узнать Николу Теслу как большого ученого, глубокого философа и оригинального лингвиста.
Лекции — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Лекции», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
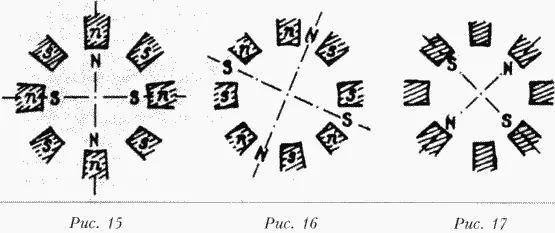
В основном цепи двигателей могут быть расположены подобным образом и их реализация может быть различной в зависимости от конкретных требований, но самый простой и практичный способ — снабдить неподвижную часть мотора первичной обмоткой, таким образом удается избежать применения скользящих контактов. В этом случае обмотки магнита в обоих контурах соединяются попеременно, т. е. 1,3,5… в одном и 2,4,6… в другом, и обмотки каждой цепи могут соединяться одинаково или, напротив, попеременно; в последнем случае мы будем иметь двигатель с числом полюсов вдвое меньшим и работать он будет по-другому. Рисунки 15, 16 и 17 показывают три различные фазы, причем обмотки магнита в каждом контуре соединены попеременно оппозитно. В данном случае всегда будем иметь четыре полюса, как на рисунках 15 и 17, четыре зубца будут нейтральны, а на рисунке 16 два расположенных рядом зубца имеют одинаковую полярность. Если обмотки соединены одинаково, то имеем восемь попеременных полюсов, как обозначено буквами n's' на рисунке 15.
Применение многополюсных моторов дает преимущество столь необходимое, сколь недостижимое в двигателях постоянного тока, а именно: можно сделать так, чтобы двигатель работал с заданной скоростью независимо от недостатков конструкции, нагрузки и, в определенных пределах, электродвижущей и силы тока.
В общей системе распределения, как эта, следует придерживаться такой схемы. В качестве центрального источника надлежит использовать генератор со значительным числом полюсов. Двигатели, питающиеся от этого генератора, должны быть синхронными, но обладать значительным вращательным моментом для надежного запуска.
При соблюдении требований к конструкции можно будет заметить, что скорость вращения каждого мотора находится в обратной зависимости от его габаритов, таким же образом следует подходить к выбору числа полюсов. Однако особые требования могут внести изменения в это правило. С учетом этого хорошо было бы снабдить каждый мотор большим числом полюсных зубцов и обмоток, их количество должно быть кратным двум или трем. Это поможет простым изменением соединений обмоток адаптировать мотор для конкретных требований.
Если число полюсов в двигателе четное, то он будет работать плавно, и вы достигнете нужного результата; если же это не подходит, то лучше всего удвоить число полюсов и соединить их, как было описано выше, так, чтобы выходила половина числа пар полюсов. Например, у генератора 12 полюсов, а нужно получить скорость 12/ 7скорости генератора. Для этого потребуется мотор с семью зубцами или магнитами, а такой мотор нельзя правильно соединить в цепь, если только не использовать 14 обмоток якоря, а это потребует применения скользящих контактов. Во избежание этого мотор должен иметь четырнадцать магнитов, включая по семь в каждую цепь попеременно. Якорь должен иметь четырнадцать замкнутых катушек. Мотор не будет работать идеально, как с четным числом полюсов, но, по крайней мере, его недостаток не будет столь серьезным.
Однако недостатки, являющиеся следствием такой несимметричной формы, уменьшатся в той же пропорции, в какой увеличится число полюсов. Если генератор имеет, скажем, п, а мотор га. полюсов, то скорость мотора будет равна скорости генератора, умноженной на дробь п/п 1.
Скорость вращения мотора в целом зависит от количества полюсов, но возможны исключения. Скорость может меняться в зависимости от фазы тока в контурах или от характера импульса тока, или от интервала между импульсами, или от групп импульсов. Некоторые возможные случаи показаны на рисунках 18, 19, 20, 21, из которых всё ясно. На рисунке 18 показано наиболее часто встречающееся положение дел, когда достигается наилучший результат.
В таком случае, если применяется типичный двигатель, показанный на рисунке 9, одна полная волна в каждом контуре дает один полный оборот двигателя. На рисунке 19 такой же результат обеспечен одной волной в каждом контуре, когда импульсы следуют друг за другом, на рисунке 20 — четырьмя, а на рисунке 21 — восемью волнами.
Такими средствами можно достигать любой скорости, конечно, в пределах практических нужд. Эта система имеет еще одно преимущество, помимо прочих, — оно заключается в ее простоте. При полной нагрузке моторы показывают КПД, идентичный моторам постоянного тока. Трансформаторы демонстрируют дополнительное преимущество своей способностью питать двигатель. Они могут быть подобным же образом модифицированы и это облегчит внедрение моторов и их адаптацию для практических нужд. Их КПД должен быть выше, чем у современных, и вот на чем я основываю свое мнение.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Лекции»
Представляем Вашему вниманию похожие книги на «Лекции» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



![Олег Арсенов - Никола Тесла [Человек, опередивший время]](/books/416936/oleg-arsenov-nikola-tesla-chelovek-operedivshij-vr-thumb.webp)

Обсуждение, отзывы о книге «Лекции» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.