Питер Бентли - Всё об искусственном интеллекте за 60 минут
Здесь есть возможность читать онлайн «Питер Бентли - Всё об искусственном интеллекте за 60 минут» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2020, ISBN: 2020, Издательство: АСТ, Жанр: Прочая детская литература, Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Всё об искусственном интеллекте за 60 минут
- Автор:
- Издательство:АСТ
- Жанр:
- Год:2020
- Город:Москва
- ISBN:978-5-17-123535-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Всё об искусственном интеллекте за 60 минут: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Всё об искусственном интеллекте за 60 минут»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для широкого круга читателей.
Всё об искусственном интеллекте за 60 минут — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Всё об искусственном интеллекте за 60 минут», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Лицевые эмоции распознаются путем идентификации отдельных мышечных движений, или «единиц действия» ( Action Unit, AU ), с помощью машинного обучения. Затем компьютер использует систему кодирования лицевых действий ( Facial Action Coding System, FACS ) для расшифровки отображенных эмоций. Например, AU6 + AU12 + AU25 означает «счастливый», а комбинация AU4 + AU15 + AU17 – «грустный». Некоторые единицы действия часто происходят одновременно, другие – очень редко: скажем, AU25 («разомкнутые губы») и AU24 («сжатые губы»); последние иногда меняют значение эмоции (например, когда человек хмурится, одновременно улыбаясь). Используя эти правила, основанные на результатах многолетних исследований, компьютер способен анализировать лица на изображениях и видео и обнаруживать даже микровыражения, распознать которые довольно трудно. Эта программа также может показать разницу между фальшивой улыбкой Pan Am и искренней улыбкой Дюшена [17] Улыбки Pan Am – знаменитые показные улыбки стюардесс компании Pan American World Airways . Они всегда должны были улыбаться, находясь рядом с пассажирами, независимо от ситуации и собственного настроения. В такие улыбки вовлекались лишь губы, но не глаза. Также их называют ботоксными улыбками. Улыбка Дюшена – искренняя улыбка. Названа в честь французского ученого Гийома Дюшена, исследовавшего мышцы лица и их связь с улыбками. Отличительная черта улыбки Дюшена – характерные морщинки в уголках глаз.
.
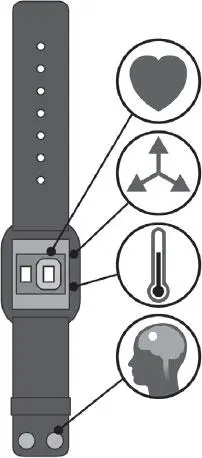
Еще одна компания, берущая свое начало в МТИ, – Empatica – разработала специальные браслеты с датчиками для людей, подверженных судорогам. Исследователи создали методы машинного обучения, чтобы классифицировать неврологические реакции, такие как эмоциональный стресс (чтобы затем сообщить нам, как уменьшить его уровень в жизни) или судороги (чтобы помочь быстро оказать соответствующую медицинскую помощь). «Выявляя физиологические аспекты эмоций, мы узнали, что некоторые неврологические реакции – определенные виды судорог – задействуют области мозга, которые также вовлечены в эмоции, – объясняет Розалинда Пикар. – Эти реакции можно выявить с помощью разработанных нами браслетов, которые изначально предназначались для распознавания эмоций».
Подобная технология применяется сегодня многими компаниями. Например, базирующиеся в Амстердаме Koninklijke Philips Elektronics и ABN AMRO Bank раздали браслеты с датчиками финансовым трейдерам. Машинное обучение выявляет и классифицирует их эмоциональные состояния, транслируя пользователям результаты в виде различных цветов. Когда трейдеры более осведомлены о собственных эмоциях, торговые риски уменьшаются, что предотвращает случайные – и чрезвычайно дорогостоящие – ошибки.
Социальные роботы
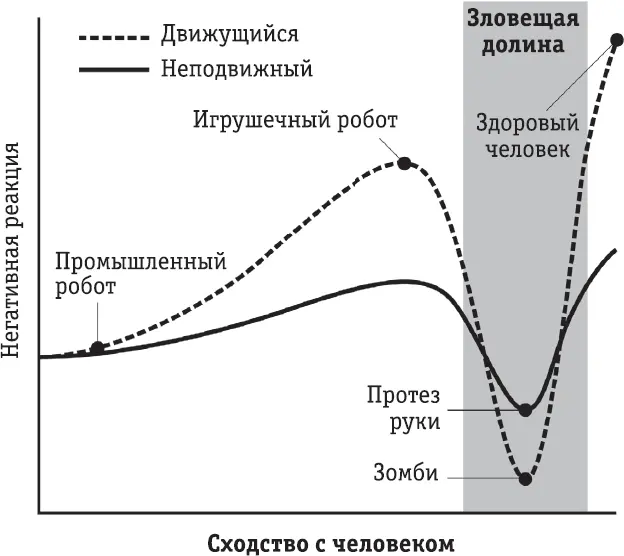
ИИ могут распознавать эмоции, но создание разумных роботов, способных взаимодействовать с людьми, всегда вызывало у инженеров-робототехников проблемы. Мы порой испытываем дискомфорт, если робот похож на человека или животного. Однако, как ни странно, мы вполне довольны роботами, внешне напоминающими игрушки или персонажей мультфильмов. Это «эффект зловещей долины». Как только реалистичность возрастает до такой степени, что робот становится похож на нечто живое, мы чувствуем себя неуютно. Если же робот к тому же начинает двигаться, наша эмоциональная реакция оказывается еще более негативной.
Это проблема, поскольку существует множество приложений, в рамках которых роботам необходимо взаимодействовать с людьми. Было бы чрезвычайно полезно иметь роботов, способных контролировать здоровье пациентов в больницах или пожилых людей дома; роботов, которые брали бы на себя скучную работу портье или предоставляли бы информацию покупателям в торговых центрах. В идеале эти роботы должны обеспечивать дружеское общение, делать нас счастливыми и определять, какое эмоциональное влияние они на нас оказывают. Таких роботов называют социальными.
Одним из первых социальных роботов стал робот-тюлень Paro . Разработанный Таканори Сибата из Японского национального института передовой промышленной науки и технологии в 1993 году Paro был создан по образу гренландских тюленей, которых Сибата наблюдал на северо-востоке Канады. Маленький снежно-белый пушистый робот может немного двигать ластами и телом и издавать звуки, сгенерированные на основе записей звуков живых тюленей, сделанных Сибатой. Paro способен отвечать на поглаживания, смотреть в глаза, реагировать на свое имя и изучать действия, которые вызывают благоприятную реакцию. Сибата избежал эффекта зловещей долины, сделав Paro очень похожим на игрушку. И в итоге последнего зарегистрировали как медицинское устройство и начали использовать на сеансах терапии для пациентов с деменцией в домах престарелых.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Всё об искусственном интеллекте за 60 минут»
Представляем Вашему вниманию похожие книги на «Всё об искусственном интеллекте за 60 минут» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
![Коллектив авторов - Что мы думаем о машинах, которые думают [Ведущие мировые ученые об искусственном интеллекте]](/books/31211/kollektiv-avtorov-chto-my-dumaem-o-mashinah-kotorye-thumb.webp)

Обсуждение, отзывы о книге «Всё об искусственном интеллекте за 60 минут» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.