Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
Здесь есть возможность читать онлайн «Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2013, ISBN: 2013, Издательство: Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет, Жанр: military_weapon, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Жанр:
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
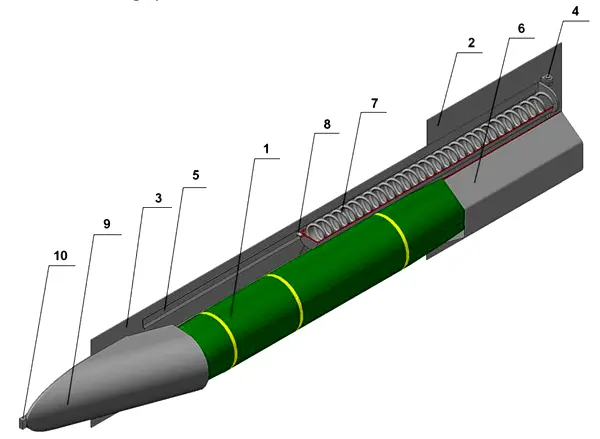
Рис. 66. Вариант расположения транспортно-пусковой системы подводного аппарата в нише легкого корпуса: 1 — НПА; 2 — легкий корпус; 3 — поворотный щит; 4 — поворотная ось; 5 — направляющие для каретки; 6 — каретка; 7 — пружинные приводы; 8 — стопорный штифт; 9 — контр-направляющая; 10 — защелка.
Приведенное устройство работает следующим образом.
При подготовке носителя к выходу из места базирования внутри специальных ниш в его корпусе монтируются подводные аппараты в необходимом количестве. Перед установкой подводного аппарата внутрь корпуса носителя поворотный щит открывается наружу, каретка с помощью не показанного приспособления взводится в рабочее состояние, при котором пружинные приводы находятся в сжатом виде. После взведения каретки, в гнездо, расположенное в поворотном щите перед кареткой, вворачивается резьбовой стопорный штифт, удерживающий каретку во взведенном состоянии. После этого в паз направляющей каретки вводится челнок хвостовой части подводного аппарата, располагаемого вдоль поворотного щита.
По окончании установки подводного аппарата поворотный щит поворачивается относительно осей поворота и закрывается таким образом, что его наружная поверхность становится заподлицо с наружной поверхностью корпуса носителя. При этом поворотный щит фиксируется в закрытом положении подпружиненной защелкой.
Непосредственно перед выходом носителя из пункта базирования из гнезда в поворотном щите выкручивается резьбовой стопорный штифт, в результате чего каретка с расположенным в ней подводным аппаратом смещается под действием пружинных приводов вдоль поворотного щита до контакта подводного аппарата с контр-направляющей. Таким образом, установленный на носитель подводный аппарат переводится в режим готовности к пуску.
Для отделения подводного аппарата от носителя, на электродвигатель, открывающий защелку, дистанционно подается напряжение. При этом защелка выходит из зацепления и освобождает поворотный щит от фиксации. При смещении подводного аппарата поворотный щит начинает открываться, поворачиваясь относительно осей поворота. Головная часть подводного аппарата за счет силы, действующей на него со стороны упорного диска каретки, на которую давят пружинные привода, начинает скользить по контр-направляющей. Подводный аппарат совместно с кареткой начинают двигаться вдоль поворотного щита по направляющим. При этом движение каретки и подводного аппарата зависит только от характеристик пружинных приводов.
Пройдя расстояние, достаточное для того, чтобы вытолкнуть подводный аппарат с требуемой выходной скоростью, каретка начинает торможение в тормозном устройстве. При этом происходит постепенное заклинивание направляющих элементов каретки, расположенных на кожухах, в сужающемся зазоре между ними и направляющими. Полная остановка каретки происходит в таком месте, чтобы ее положение не мешало последующему закрытию поворотного щита.
С задержкой после начала пуска подводного аппарата на электродвигатель защелки подается обратное напряжение, в результате чего защелка возвращается в исходное положение. При этом срабатывает сигнализатор ее закрытого положения.
После того, как подводный аппарат полностью выходит с определенной выходной скоростью за пределы корпуса носителя, поворотный щит начинает закрываться под воздействием специального пружинящего приспособления (например, пружины растяжения). При этом щеколда замка входит во взаимодействие со скошенной поверхностью защелки, которая, под действием пружины возвращается и надежно фиксирует поворотный щит от несанкционированных перемещений в процессе дальнейшего движения носителя. Возвратившись в закрытое положение, защелка приводит в действие сигнализатор ее закрытого положения, который подтверждает, что пуск подводного аппарата произведен успешно.
Приведенные в настоящей главе примеры иллюстрируют целый пласт технических решений, реализация которых может позволить частично нейтрализовать ту угрозу, которая возникает в связи с изменением тактики ведения боевых действий на море быстром развитии необитаемых морских аппаратов.
Заключение
Обобщая сведения, приведенные в книге, необходимо констатировать, что текущий этап развития необитаемых морских аппаратов характеризуется созданием базовой основы для долговременного развития этого направления подводной техники. Основные разработки по всем направлениям развития НПА и ННА активно проводятся в США, однако целый ряд других стран, в том числе входящих в блок НАТО, также имеют существенные наработки в данной области [62]. При этом реализация планов развития НПА военного назначения может привести к революционным изменениям в конструктивном облике подводных лодок.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века»
Представляем Вашему вниманию похожие книги на «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Макс Глебов - Асимметричный ответ [СИ litres]](/books/397832/maks-glebov-asimmetrichnyj-otvet-si-litres-thumb.webp)


Обсуждение, отзывы о книге «Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.