Shaoshan Liu - Engineering Autonomous Vehicles and Robots
Здесь есть возможность читать онлайн «Shaoshan Liu - Engineering Autonomous Vehicles and Robots» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Engineering Autonomous Vehicles and Robots
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Engineering Autonomous Vehicles and Robots: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Engineering Autonomous Vehicles and Robots»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Engineering Autonomous Vehicles and Robots: The DragonFly Modular-based Approach
and
Offers progressive guidance on building autonomous vehicles and robots Provides detailed steps and codes to create an autonomous machine, at affordable cost, and with a modular approach Written by one of the pioneers in the field building autonomous vehicles Includes case studies, source code, and state-of-the art research results Accompanied by a website with supplementary material, including sample code for chassis/sonar/radar; GPS deployment methods; Vision Calibration methods
is an excellent book for students, researchers, and practitioners in the field of autonomous vehicles and robots.
Engineering Autonomous Vehicles and Robots — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Engineering Autonomous Vehicles and Robots», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Nonetheless, the large-scale adoption of autonomous driving vehicles is now meeting with several barriers, including reliability, ethical and legal considerations, and, not least of which, affordability. What are the problems behind the building and deploying of autonomous vehicles and how can we solve them? Answering these questions demands that we first look at the underlying design.
1.2 High Cost of Autonomous Driving Technologies
In this section we break down the costs of existing autonomous driving systems, and demonstrate that the high costs of sensors, computing systems, and High-Definition (HD) maps are the major barriers of autonomous driving deployment [7] ( Figure 1.1).
1.2.1 Sensing
The typical sensors used in autonomous driving include Global Navigation Satellite System (GNSS), Light Detection and Ranging (LiDAR), cameras, radar and sonar: GNSS receivers , especially those with real-time kinematic (RTK) capabilities, help autonomous vehicles localize themselves by updating global positions with at least meter-level accuracy. A high-end GNSS receiver for autonomous driving could cost well over $10 000.
LiDAR is normally used for the creation of HD maps, real-time localization, as well as obstacle avoidance. LiDAR works by bouncing a laser beam off of surfaces and measuring the reflection time to determine distance. LiDAR units suffer from two problems: first, they are extremely expensive (an autonomous driving grade LiDAR could cost over $80 000); secondly, they may not provide accurate measurements under bad weather conditions, such as heavy rain or fog.
Cameras are mostly used for object recognition and tracking tasks, such as lane detection, traffic light detection, and pedestrian detection. Existing implementations usually mount multiple cameras around the vehicle to detect, recognize, and track objects. However, an important drawback of camera sensors is that the data they provide may not be reliable under bad weather conditions and that their sheer amount creates high computational demands. Note that these cameras usually run at 60 Hz, and, when combined, can generate over 1 GB of raw data per second.
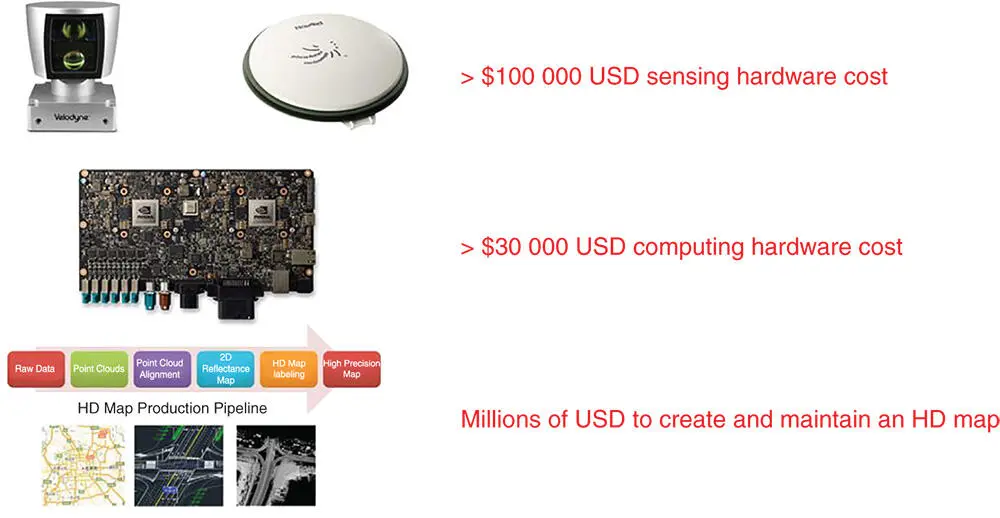
Figure 1.1 Cost breakdown of existing autonomous driving solutions.
Radar and sonar : The radar and sonar subsystems are used as the last line of defense in obstacle avoidance. The data generated by radar and sonar show the distance from the nearest object in front of the vehicle's path. Note that a major advantage of radar is that it works under all weather conditions. Sonar usually covers a range of 0–10 m whereas radar covers a range of 3–150 m. Combined, these sensors cost less than $5000.
1.2.2 HD Map Creation and Maintenance
Traditional digital maps are usually generated from satellite imagery and have meter-level accuracy. Although this accuracy is sufficient for human drivers, autonomous vehicles demand maps with higher accuracy for lane-level information. Therefore, HD maps are needed for autonomous driving.
Just as with traditional digital maps, HD maps have many layers of information. At the bottom layer, instead of using satellite imagery, a grid map is generated by raw LiDAR data, with a grid granularity of about 5 cm by 5 cm. This grid basically records elevation and reflection information of the environment in each cell. As the autonomous vehicles are moving and collecting new LiDAR scans, they perform self-localization by performing a real time comparison of the new LiDAR scans against the grid map with initial position estimates provided by GNSS [8].
On top of the grid layer, there are several layers of semantic information. For instance, lane information is added to the grid map to allow autonomous vehicles to determine whether they are on the correct lane when moving. On top of the lane information, traffic sign labels are added to notify the autonomous vehicles of the local speed limit, whether traffic lights are nearby, etc. This gives an additional layer of protection in case the sensors on the autonomous vehicles fail to catch the signs.
Traditional digital maps have a refresh cycle of 6–12 months. However, to make sure the HD maps contain the most up-to-date information, the refresh cycle for HD maps should be shortened to no more than one week. As a result, operating, generating, and maintaining HD maps can cost upwards of millions of dollars per year for a mid-size city.
1.2.3 Computing Systems
The planning and control algorithms and the object recognition and tracking algorithms have very different behavioral characteristics which call for different kinds of processors. HD maps, on the other hand, stress the memory [9]. Therefore, it is imperative to design a computing hardware system which addresses these demands, all within limited computing resources and power budget. For instance, as indicated in [9], an early design of an autonomous driving computing system was equipped with an Intel ®Xeon E5 processor and four to eight Nvidia ®K80 graphics processing unit (GPU) accelerators, connected with a Peripheral Component Interconnect-E (PCI-E) bus. At its peak, the whole system, while capable of delivering 64.5 Tera Operations Per Second (TOPS), consumed about 3000 W, consequently generating an enormous amount of heat. Also, at a cost of $30 000, the whole solution would be unaffordable (and unacceptable) to the average consumer.
1.3 Achieving Affordability and Reliability
Many major autonomous driving companies, such as Waymo, Baidu, and Uber, and several others are engaged in a competition to design and deploy the ultimate ubiquitous autonomous vehicle which can operate reliably and affordably, even in the most extreme environments. Yet, we have just seen that the cost for all sensors could be over $100 000, with the cost for the computing system another $30 000, resulting in an extremely high cost for each vehicle: a demo autonomous vehicle can easily cost over $800 000 [10]. Further, beyond the unit cost, it is still unclear how the operational costs for HD map creation and maintenance will be covered.
In addition, even with the most advanced sensors, having autonomous vehicles coexist with human-driven vehicles in complex traffic conditions remains a dicey proposition. As a result, unless we can significantly drop the costs of sensors, computing systems, and HD maps, as well as dramatically improve localization, perception, and decision-making algorithms in the next few years, autonomous driving will not be universally adopted.
Addressing these problems, a reliable autonomous vehicle has been developed by us and for low-speed scenarios, such as university campuses, industrial parks, and areas with limited traffic [11,12]. This approach starts with low speed to ensure safety, thus allowing immediate deployment. Then, with technology improvements and with the benefit of accumulated experience, high-speed scenarios will be envisioned, ultimately having the vehicle's performance equal that of a human driver in any driving scenario. The keys to enable affordability and reliability include using sensor fusion, modular design, and high-precision visual maps (HPVMs).
1.3.1 Sensor Fusion
Using LiDAR for localization or perception is extremely expensive and may not be reliable. To achieve affordability and reliability, multiple affordable sensors (cameras, GNSS receivers, wheel encoders, radars, and sonars) can be used to synergistically fuse their data. Not only do these sensors each have their own characteristics, drawbacks, and advantages but they complement each other such that when one fails or otherwise malfunctions, others can immediately take over to ensure system reliability. With this sensor fusion approach, sensor costs are limited to under $2000.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Engineering Autonomous Vehicles and Robots»
Представляем Вашему вниманию похожие книги на «Engineering Autonomous Vehicles and Robots» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Engineering Autonomous Vehicles and Robots» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.