М. Бабаев - Приборостроение
Здесь есть возможность читать онлайн «М. Бабаев - Приборостроение» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2008, ISBN: 2008, Издательство: Array Конспекты, шпаргалки, учебники «ЭКСМО», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Приборостроение
- Автор:
- Издательство:Array Конспекты, шпаргалки, учебники «ЭКСМО»
- Жанр:
- Год:2008
- Город:Москва
- ISBN:978-5-699-25220-6
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Приборостроение: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Приборостроение»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Приборостроение — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Приборостроение», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Движущийся узел некоторого механизма, который приводит в движение другой узел, называют ведущим звеном. Тот узел, который ведущий приводится в движение, называют ведомым звеном.
Точность любого механизма определяется тем, насколько точно соответствуют параметры узлов заданным (или расчетным). Этими и другими вопросами, такими как выявление погрешностей звеньев, влияющих на точность механизмов в целом, занимается теория точности механизмов.
Современная теория точности механизмов состоит из теории механизмов и машин, технологии, метрологии, теории ошибок.
Здесь излагается теория ошибок, ее задачей является: определить пути повышения точности механизмов, суммируя частные погрешности (т. е. погрешности узлов). Теория точности механизмов занята решением двух задач.
1. Прямая задача – трудно решаемая задача. Ее суть состоит в определении соответствия параметров каждого узла техническим требованиям. Эта работа требует согласования большого числа параметров.
2. Обратная задача. При решении этой задачи, главным является соответствие механизма конечному результату.
Характерные ошибки: 1) ошибка положения механизмов. Имеется в виду следующее: если взять два механизма, которые должны совершить некоторое согласованное действие, то несмотря на полное соответствие параметров ведущих звеньев, обнаруживается разница; эта разница и есть искомая ошибка. Эти механизмы можно себе представить как механизм действительный и его теоретический прототип, то есть под ошибкой имеется в виду несоответствие образца теоретическому прототипу;
2) ошибка перемещения механизмов: речь идет о несоответствии параметров ведомых узлов при тех же параметрах ведущих. Только теперь разница в перемещении, а не в положении ведомых узлов;
3) ошибка положения ведомого звена – имеется в виду та же ошибка, что и в (1), только теперь ее причина в неточности ведущих звеньев, последние часто являются последствиями неправильных вводных данных;
4) ошибка перемещения ведомого звена: то же самое, что и ошибка (2), только теперь причина в ведущих звеньях, но по той же причине, что и в (3);
5) ошибка передаточного отношения (имеется в виду разность между действительным i g (у образца) и теоретическим i m передаточными отношениями):
6) ошибка линейного передаточного отношения. Аналогично предыдущей ошибке, речь идет о разности между действительным i ' g и теоретическим i' m линейными передаточными отношениями
Δi =i ' g– i ' m
17. Факторы, порождающие ошибки в приборостроении
Классификация факторов:
1) причины, связанные со схемой погрешностей, которые появляются при изготовлении механизмов (т. е. при применении схемы);
2) технологические причины, которые по линейным, т. е. геометрическим размерам разделяются на:
а) ошибки размера – отклонения размеров элементов у образца и теоретического прототипа от номинальной величины, а также ошибки между элементами, которые появляются при перемещении узлов, составляющих пару (кинематические пары);
б) ошибки формы у рабочих поверхностей тех же пар;
в) ошибки во взаимном расположении рабочих поверхностей узлов;
г) отклонения в шероховатости и волнистости от номинальных;
3) ошибки, вызванные силами в самом механизме (это силы деформации, трения, вибрации и прочие, а также воздействие динамических факторов (например, ударно-колебательное движение));
4) ошибки, связанные с нарушением температурного режима эксплуатации механизма, из-за изменения сопротивлений и линейных размеров в узлах;
5) ошибки, связанные с износом механизмов, в этом случае могут появиться любая из предыдущих ошибок или все вместе.
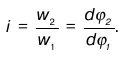
Передаточное отношение – это отношение мгновенных угловых скоростей, что одно и то же с мгновенными угловыми перемещениями звеньев ведомого и ведущего. Пусть угол поворота ведомого звена есть φ 1, причем φ 2 зависит от угла поворота ведущего звена φ 1.Тогда передаточное отношение:
Линейное передаточное отношение: речь идет об отношении мгновенных линейных скоростей (что одно и то же с мгновенными линейными перемещениями) ведомого и ведущего звеньев в механизме. Если эти перемещения соответственно обозначить как V 2 , V 1, то эти отношения:
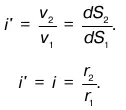
r 1, r 2 – радиусы ведущего и ведомого звеньев.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Приборостроение»
Представляем Вашему вниманию похожие книги на «Приборостроение» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Приборостроение» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.