Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние
Здесь есть возможность читать онлайн «Владимир Фетисов - Беспилотная авиация - терминология, классификация, современное состояние» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Уфа, Год выпуска: 2014, ISBN: 2014, Издательство: ФОТОН, Жанр: sci_transport, Справочники, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Издательство:ФОТОН
- Жанр:
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Беспилотная авиация: терминология, классификация, современное состояние: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Беспилотная авиация: терминология, классификация, современное состояние»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Беспилотная авиация: терминология, классификация, современное состояние — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Беспилотная авиация: терминология, классификация, современное состояние», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Летательный аппарат на эффекте Коанды устроен довольно просто: над зонтообразной поверхностью установлен вентилятор или реактивный двигатель, создающий поток воздуха, выходящий через узкую щель и настилающий криволинейную поверхность. Результаты моделирования скорости потока показаны на рис. 1.18.
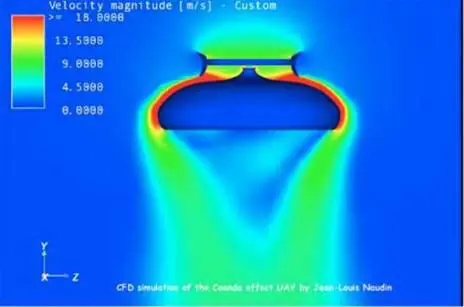
Рис. 1.18. Результаты моделирования скорости воздушного потока вдоль зонтообразной поверхности (по материалам исследований Jean-Louis Naudin, 2006)
В последние годы ряд исследователей и фирм провели достаточно удачные эксперименты по реализации эффекта Коанды применительно к построению БПЛА. Так, в Великобритании фирмой AESIR [28] испытан экспериментальный аппарат Embler, демонстрирующий возможности использования эффекта. Аппарат выполнен из углепластикового корпуса. Привод вентилятора – электромотор. Аппарат может находиться в воздухе до 10 мин. Управление направлением движения в этом БПЛА осуществляются с помощью управляемых заслонок в выходной щели вентиляторного канала (управление рысканьем), а также с помощью четырех закрылков у кромки зонтообразной поверхности (управление креном и тангажом).

Рис. 1.19. БПЛА Embler компании AESIR, принцип полета которого основан на эффекте Коанды (Великобритания, 2009)
Компания AESIR объявила также о своих планах построения целой линейки аппаратов на эффекте Коанды [29]. Они отличаются своими размерами и грузоподъемностью. Самый крупный из них, названный Hoder, показан на рис. 1.20. Этот БПЛА имеет 2 вентиляторных движителя, приводимых в движение от двигателей внутреннего сгорания. Угол расположения лопаток вентиляторов сделан регулируемым. В отличие от прототипа, показанного на рис. 1.19, у БПЛА Hoder обтекаемые поверхности сделаны вообще без всяких аэродинамических элементов управления. А управление движением осуществляется путем изменения соотношения параметров вращения и углов лопаток вентиляторов. Собственная масса аппарата 1500 кг, масса полезной нагрузки 500 кг. БПЛА предназначен для выполнения локальных транспортных миссий продолжительностью до 8 ч. Такой аппарат имеет преимущество при использовании по сравнению с обычными вертолетами в городских условиях, лесистой и горной местности, где велика вероятность повреждения несущего винта вертолета. У предлагаемого аппарата небольшие столкновения с препятствиями не могут нарушить его работу.
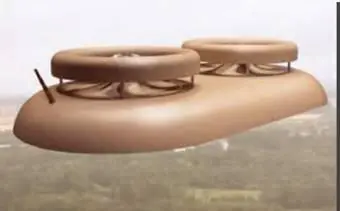
а

б
Рис. 1.20. Перспективный БПЛА Hoder компании AESIR (Великобритания, 2009): а – общий вид аппарата; б – выставочный образец
1.2.2.2. БПЛА с гибким крылом
Это дешевые и экономичные летательные аппараты аэродинамического типа, в которых в качестве несущего крыла используется не жесткая, а гибкая (мягкая) конструкция, выполненная из ткани, эластичного полимерного материала или упругого композитного материала, обладающего свойством обратимой деформации.
В этом классе БПЛА можно выделить беспилотные моторизованные парапланы, дельтапланы и БПЛА с упруго деформируемым крылом.
Беспилотный моторизованный параплан – аппарат на основе управляемого парашюта-крыла, снабжённый мототележкой с воздушным винтом для автономного разбега и самостоятельного полёта. Крыло обычно имеет форму прямоугольника или эллипса. Крыло может быть мягким, иметь жесткий или надувной каркас. Пример – разработки американской фирмы Atair Aerospace, которая предложила серию беспилотных парапланов под общим названием LEAPP (Long Endurance Autonomous Powered Paraglider) (рис. 1.21). Их основное достоинство – экономичность. Они снабжены двигателями внутреннего сгорания и способны длительное время медленно барражировать над объектом, производя, например, видеосъемку. Для запуска требуется площадка длиной 2-3 м для короткого разбега. Модель Micro LEAPP является компактной модификацией, которую может обслуживать один человек (предусмотрена переноска аппарата в заплечном ранце) [30]. Недостатком беспилотных моторизованных парапланов является трудность управления ими, так как навигационные датчики не имеют жесткой связи с крылом. Ограничение на их применение оказывает также очевидная зависимость от погодных условий.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние»
Представляем Вашему вниманию похожие книги на «Беспилотная авиация: терминология, классификация, современное состояние» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Беспилотная авиация: терминология, классификация, современное состояние» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.