Томас Метцингер - Туннель Эго
Здесь есть возможность читать онлайн «Томас Метцингер - Туннель Эго» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Биология, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Туннель Эго
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Туннель Эго: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Туннель Эго»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Thomas Metzinger — The Ego Tunnel. The Science Of The Mind and The Myth Of The Self
Перевод с английского: Вячеслав Михайлов http://www.nwethik.com
Туннель Эго — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Туннель Эго», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Гибридные биороботы являются примером первой категории. Гибридная робототехника является новой дисциплиной, которая использует естественно возникшее аппаратное обеспечение, что избавляет от необходимости создавать заново нечто, что оптимизировалось природой на протяжении миллионов лет. По мере того, как мы достигаем ограничений искусственных компьютерных чипов, мы всё чаще будем прибегать к использованию органических, генетически разработанных аппаратов для роботов и искусственных агентов, которых мы будем создавать.
Примером второй категории является использование программ, записанных в нейронные сети для управления искусственным аппаратным обеспечением. Некоторые из таких попыток даже используют нейронные сети сами по себе; к примеру, кибернетики из Университета Ридинга (Великобритания) управляют роботом посредством сети из около трёхсот тысяч крысиных нейронов. Другие примеры представляют собой классические искусственные нейронные сети для усвоения языка или те, которые используются исследователями сознания вроде Axel Cleeremans из Cognitive Science Research Unit в Universite Libre de Bruxelles в Бельгии, для моделирования метарепрезентационной структуры сознания и того, что он называет «вычислительными коррелятами» оного. 2Последние два — биоморфические и лишь наполовину искусственные системы обработки информации, так, как их базовая функциональная архитектура заимствована у природы и использует паттерны обработки, которые развились в ходе биологической эволюции. Они порождают состояния «более высокого порядка», которые, однако, всецело относятся к подличностному.
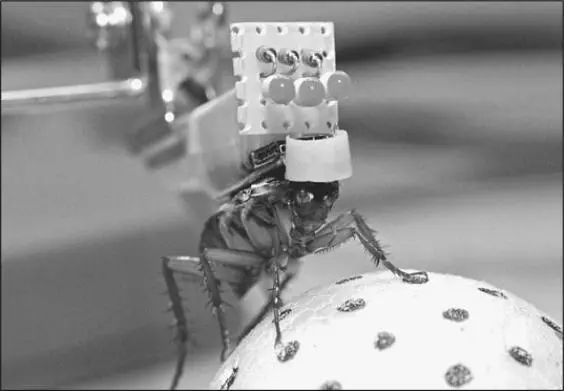
Рисунок 16: РобоТаракан. Управление движениями таракана при помощи хирургически имплантированного микророботического рюкзака. «Рюкзак» таракана содержит ресивер, который преобразует сигналы от удалённого управления в электрические стимулы, которые прикладываются к основе антенн таракана. Это позволяет оператору останавливать таракана, направлять вперёд, разворачивать назад, поворачивать вправо и влево по команде.
Возможно, скоро у нас появится функционалистская теория сознания, но это не значит, что мы также будем способны применить функции, описываемые этой теорией, на системах с небиологическим носителем. Искусственное сознание — это не сколько теоретическая проблема в контексте философии ума, сколько технологический вызов; дъявол в деталях. Реальная проблема лежит в разработке не-нейронного типа аппаратного обеспечения с соответствующими мощностями: Даже простейшая, минимальная форма «синтетической феноменологии» может оказаться труднодостижимой, причём, по чисто техническим причинам.
Первые само-моделирующие машины уже появились. Исследователи в области искусственной жизни уже давно начали симулировать процесс эволюции, но сегодня мы имеем новую академическую дисциплину, которая называется «эволюционная робототехника». Josh Bongard с кафедры компьютерных наук Университета Вермонта, вместе со своими коллегами Виктором Зыковым и Hod Lipson, создали искусственную морскую звезду, которая постепенно развивает явную внутреннюю себя-модель. 3Их четырехногая машина использует отношение срабатывания-чувствования для формирования мнения, косвенным образом, относительно собственной структуры, после чего использует себя-модель для произведения дальнейшего движения. Когда ей удаляют часть ноги, машина адаптирует себя-модель и производит альтернативные походки — она учится хромать. В отличие пациентов с фантомными конечностями, о которых мы писали в части 4, она может реструктурировать представление о собственном теле в соответствии с потерей конечности; таким образом, по сути, она может учиться. Как заявляют создатели, она может «автономно восстановить собственную топологию, имея некоторое предварительное знание», постоянно оптимизируя параметры получающейся в результате себя-модели. Морская звезда не только синтезирует внутреннюю себя-модель, но также использует её для порождения разумного поведения.

Рисунок 17а: Морская звезда, четырёхногий робот, который ходит, благодаря использованию внутреннего себя-модели, которую он развивает и которую постоянно улучшает. Если он теряет конечность, он может адаптировать внутреннего себя-модель. 5
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Туннель Эго»
Представляем Вашему вниманию похожие книги на «Туннель Эго» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Туннель Эго» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.