Томас Метцингер - Туннель Эго
Здесь есть возможность читать онлайн «Томас Метцингер - Туннель Эго» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Биология, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Туннель Эго
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Туннель Эго: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Туннель Эго»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Thomas Metzinger — The Ego Tunnel. The Science Of The Mind and The Myth Of The Self
Перевод с английского: Вячеслав Михайлов http://www.nwethik.com
Туннель Эго — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Туннель Эго», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
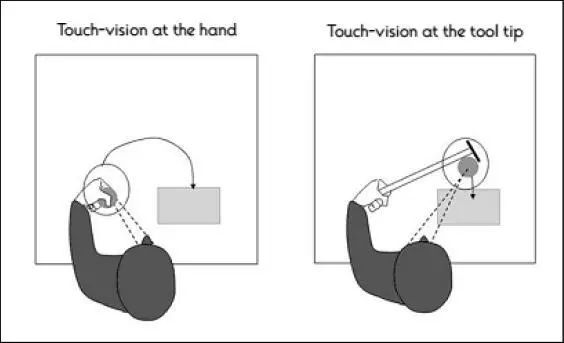
Рисунок 3: Интеграция прикосновения и зрения. Испытуемый пытается поместить монетку (маленький тёмный кружок) в лоток собственной рукой и при помощи инструмента. На рисунке справа, интегрированное переживание зрения и прикосновения переносится с руки на наконечник инструмента. Пунктирными линиями обозначено направление взгляда; стрелки обозначают направление движения. Большой белый круг обозначает область, в которой, согласно сознательной модели действительности, соединяются зрительные и тактильные ощущения. Рисунок авторства Angelo Maravita.
Возникает впечатление, что обезьяны так же способны инкорпорировать в свою телесную себя-модель визуальный образ собственной руки так, как он явлен на экране монитора компьютера. Если образ змеи или паука достигает изображения руки на экране, животное отдёргивает свою реальную руку. Обезьяны даже могут научиться контролировать интерфейс мозг-машина, который позволяет им хватать объекты рукой робота, которая управлялась определенными участками их мозга. 9Возможно, наиболее увлекательной, с точки зрения философии, является идея о том, что всё это внесло вклад в эволюционное возникновение квази-Картезианского «мета-себя», то есть, способности дистанцировать самого себя от своего телесного воплощения, рассматривая собственное тело в качестве инструмента. 10
Очевидно, что визуальный образ руки робота, так же, как и в случае с резиновой рукой, встраивается в танцующий себя-паттерн в мозгу макаки. Интеграция обратной связи, получаемой от руки робота, в эту себя-модель и является тем, что позволяет макаке контролировать руку, функционально инкорпорировать её в собственный поведенческий репертуар. Для того, чтобы выработать способность к разумному использованию инструмента, макаке приходится встраивать эти грабли в себя-модель; в противном случае, обезьяна не смогла бы понять, что она может использовать эти грабли в качестве расширения собственного тела. Тут есть связь между самостью и расширяющимся глобальным контролем.
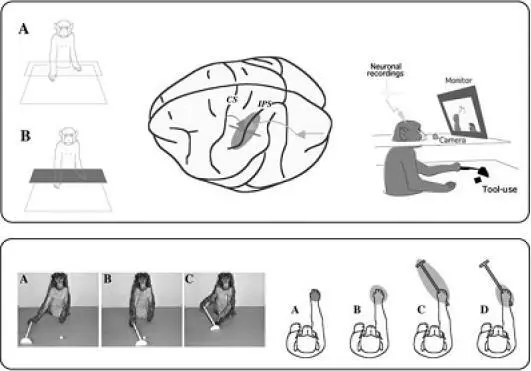
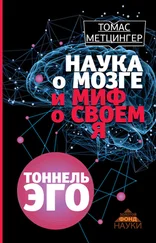
Рисунок 4: Японская макака демонстрирует разумное использование инструмента. Она способна граблями достать комочек пищи (снизу); также, она способна набблюдать за собственными движениями при помощи образов на экране компьютера, даже тогда, когда их руки невидимы (посередине и сверху): Простое расширение поведенческого пространства, или расширение феноменальной себя-модели? Рисунки авторства Atsushi Iriki.
Человеческие существа точно так же рассматривают виртуальные эквиваленты частей своего тела, которые они видят в режиме видео на экране, в качестве расширения собственных тел. Вспомните указатель компьютерной мышки на дисплее компьютера или управляемых персонажей видеоигр. Это может служить объяснением чувства «присутствия», иногда в нас возникающего, когда мы играем в ультрареалистичные игры. Способность многих участков мозга инкорпорировать искусственные устройства когда-нибудь позволит пациентам успешно управлять сложными протезами (которые, к примеру, посылают информацию от тактильных и позиционных датчиков в имплантированное в мозг многоканальное записывающее устройство с беспроводным управлением), привнося вместе с этим просто удовольствие от чувства осознанного владения такими устройствами. Всё это даёт нам более глубокое понимания обладания. На более высоких уровнях, обладание — это не просто пассивная интеграция в сознательную себя-модель: Гораздо чаще, оно имеет отношение к интегрированию чего-либо в петлю обратной связи с последующим размещением в иерархии управления. Дела обстоят так, словно бы эволюция языка, культуры и абстрактной мысли представляла собой процесс «экзаптации», использования наших телесных карт в ответ на новые потребности и вызовы; к этому пункту я вернусь в главе, посвященной эмпатии и зеркальным нейронам. Проще говоря, экзаптация — это сдвиг функционального применения определенной особенности организма в процессе эволюции: Перья птиц представляют собой классический пример, потому что изначально они развились «для» температурной регуляции, но позже оказались приспособлены для полёта. Основная идея здесь заключается в том, что интегрированная телесная себя-модель была экстремально полезным новообразованием, так как открыла возможность для огромного количества непредсказуемых экзаптаций. Очевидно, что один общий механизм лежит в основе иллюзии резиновой руки, эволюции использования инструментов без усилий, способности переживать телесное присутствие в виртуальной среде и способности контролировать искусственные устройства собственным мозгом. Этот механизм — это себя-модель, интегрированная репрезентация организма как целого, расположенная в мозгу. Эта репрезентация суть непрерывный процесс: Она гибкая, может постоянно обновляться и позволяет вам овладевать частями мира путём интеграции. Её содержимое есть содержимое Эго.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Туннель Эго»
Представляем Вашему вниманию похожие книги на «Туннель Эго» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Туннель Эго» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.