Скотт Майерс - Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ
Здесь есть возможность читать онлайн «Скотт Майерс - Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: Array Литагент «ДМК», Жанр: Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-94074-304-8
- Рейтинг книги:4 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание ориентировано на программистов, знакомых с основами C++ и имеющих навыки его практического применения.
Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Независимо от того, какой из аргументов применим в вашем случае, чем-то придется пожертвовать, но при любых обстоятельствах запрет на переопределение наследуемых невиртуальных функций остается в силе.
Если при чтении этого правила у вас возникло ощущение «дежа вю», то, наверное, вы просто вспомнили правило 7, где я объяснял, почему деструкторы в полиморфных базовых классах должны быть виртуальными. Если вы не следуете этому совету (то есть объявляете невиртуальные деструкторы в полиморфных базовых классах), то нарушаете и требование, изложенное в настоящем правиле, потому что все производные классы автоматически переопределяют унаследованную невиртуальную функцию – деструктор базового класса. Это верно даже для производных классов, в которых нет деструкторов, потому что, как объясняется в правиле 5, компилятор генерирует деструктор автоматически, если вы не определяете его сами. По существу, правило 7 – это лишь частный случай настоящего правила, хотя и заслуживает отдельного внимания и рекомендаций по применению.
• Никогда не переопределяйте наследуемые невиртуальные функции.
Правило 37: Никогда не переопределяйте наследуемое значение аргумента функции по умолчанию
Давайте с самого начала упростим обсуждение. Есть только два типа функций, которые можно наследовать: виртуальные и невиртуальные. Но переопределять наследуемые невиртуальные функции в любом случае ошибочно (см. правило 36), поэтому мы вполне можем ограничить наше обсуждение случаем наследования виртуальной функции со значением аргумента по умолчанию.
В этих обстоятельствах мотивировка настоящего правила становится достаточно очевидной: виртуальные функции связываются динамически, а значения аргументов по умолчанию – статически.
Что это значит? Вы говорите, что уже позабыли, в чем заключается разница между статическим и динамическим связыванием? (Кстати, статическое связывание называют еще ранним связыванием, а динамическое – поздним.) Что ж, давайте освежим вашу память.
Статический тип объекта – это тип, объявленный вами в тексте программы. Рассмотрим следующую иерархию классов:
// классы для представления геометрических фигур
class Shape {
public:
enum ShapeColor { Red, Green, Blue };
// все фигуры должны предоставлять функцию для рисования
virtual void draw(ShapeColor color = Red) const = 0;
...
};
class Rectangle: public Shape {
public:
// заметьте, другое значение параметра по умолчанию – плохо!
virtual void draw(ShapeColor color = Green) const;
...
};
class Circle: public Shape {
public:
virtual void draw(ShapeColor color) const;
...
};
Графически это можно представить так:
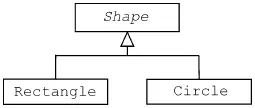
Теперь рассмотрим следующие указатели:
Shape *ps; // статический тип – Shape*
Shape *pc = new Circle; // статический тип – Shape*
Shape *pr = new Rectangle; // статический тип – Shape*
В этом примере ps, pc и pr объявлены как указатели на Shape, так что для всех них он и будет выступать в роли статического типа. Отметим, что не совершенно безразлично, на что они указывают в действительности, – независимо от этого они имеют статический тип Shape*.
Динамический тип объекта определяется типом того объекта, на который он ссылается в данный момент. Иными словами, динамический тип определяет поведение объекта. В приведенном выше примере динамический тип pc – это Circle*, а динамический тип pr – Recangle*. Что касается ps, то он не имеет динамического типа, потому что не указывает ни на какой объект (пока).
Динамические типы, как следует из их названия, могут изменяться в процессе работы программы, обычно вследствие присваивания:
ps = pc; // динамический тип ps теперь Circle*
ps = pr; // динамический тип ps теперь Rectangle*
Виртуальные функции связываются динамически, то есть динамический тип вызывающего объекта определяет, какая конкретная функция вызывается:
pc->draw(Shape::Red); // вызывается Circle::draw(Shape::Red)
pr->draw(Shape::Red); // вызывается Rectangle::draw(Shape::Red)
Я знаю, что все это давно известно, и вы, несомненно, разбираетесь в виртуальных функциях. Самое интересное начинается, когда мы подходим к виртуальным функциям с аргументами, принимающими значения по умолчанию, поскольку, как я уже сказал, виртуальные функции связываются динамически, а аргументы по умолчанию – статически. Следовательно, вы можете прийти к тому, что будете вызывать виртуальную функцию, определенную в производном классе, но при этом использовать аргументы по умолчанию, заданные в базовом классе:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ»
Представляем Вашему вниманию похожие книги на «Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Эффективное использование C++. 55 верных способов улучшить структуру и код ваших программ» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.