Джереми Блум - Изучаем Arduino - инструметы и методы технического волшебства
Здесь есть возможность читать онлайн «Джереми Блум - Изучаем Arduino - инструметы и методы технического волшебства» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2015, ISBN: 2015, Издательство: БХВ-Петербург, Жанр: Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Изучаем Arduino: инструметы и методы технического волшебства
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2015
- Город:Санкт-Петербург
- ISBN:978-5-9775-3585-4
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Изучаем Arduino: инструметы и методы технического волшебства: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Изучаем Arduino: инструметы и методы технического волшебства»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для радиолюбителей
Изучаем Arduino: инструметы и методы технического волшебства — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Изучаем Arduino: инструметы и методы технического волшебства», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
ВНИМАНИЕ!
Так как техническая реализация протокола SPI может быть разной, необходимо изучать техническое описание, прилагаемое к каждому устройству.
В зависимости от требований конкретного устройства существуют четыре основных способа реализации протокола SPI. SPI-устройства выступают при обмене в качестве подчиненных синхронных устройств, данные синхронизируются с тактовым сигналом (SCLK). Подчиненное устройство может воспринимать данные либо по положительному, либо по отрицательному фронту тактового сигнала (так называемая фаза синхронизации), а активное состояние SCLK по умолчанию может быть высоким или низким уровнем (так называемая полярность синхронизации).
В итоге получается, что обмен SPI в общей сложности можно настроить четырьмя способами (табл. 9.1).
Таблица 9.1. Режимы SP/ в Arduino IDE
|
No |
Режим SPI |
Полярность синхронизации |
Фаза синхронизации |
|
1 |
Mode O |
LOW |
По фронту синхросигнала |
|
2 |
Mode 1 |
LOW |
По спаду синхросигнала |
- 188 -
Таблица 9.1 (окончание)
|
No |
Режим SPI |
Полярность синхронизации |
Фаза синхронизации |
|
3 |
Mode 2 |
HIGH |
По спаду синхросигнала |
|
4 |
Mode 3 |
HIGH |
По фронту синхросигнала |
9.2. Подключение устройств SPI
Систему обмена данными через SPI несложно настроить. Для связи между мастером и всеми подчиненными устройствами используется три вывода:
• последовательный сигнал синхронизации (SCLK);
• выход ведущего, вход ведомого (MOSI);
• вход ведущего, выход ведомого (MISO).
У каждого ведомого устройства также есть контакт выбора данного устройства (контакт SS). Следовательно, общее число портов ввода-вывода, необходимых на мастер-устройстве, всегда будет 3+n, где n - число ведомых устройств. Пример SPI-системы с двумя ведомыми устройствами изображен на рис. 9.1.
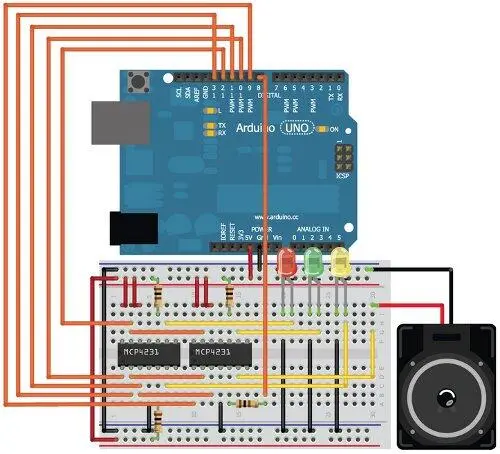
Рис. 9.1. Пример конфигурации SPI-устройств
- 189 -
Любой интерфейс SPI содержит, как минимум, четыре линии передачи данных. Для каждого ведомого устройства добавляются дополнительные линии SS. Прежде чем отправлять или получать данные через SPI, нужно выяснить, что делают эти линии ввода-вывода и как они должны быть подключены (табл. 9.2).
Таблица 9.2. Описание линий ввода-вывода интерфейса SPI
|
Линии SPI |
Описание |
|
MOSI |
Линия для отправки последовательных данных от ведущего устройства к ведомому |
|
MISO |
Линия для отправки последовательных данных от ведомого устройства к ведущему |
|
SCLK |
Линия синхронизации последовательных данных |
|
SS |
Линия выбора ведомого устройства, активный уровень - низкий |
В отличие от интерфейса I 2C, подтягивающие резисторы здесь не требуются, и протокол полностью двунаправленный. Итак, чтобы подключить устройство SPI к плате Arduino, необходимо соединить его с контактами MOSI, MISO, SCLK и SS.
После этого все готово к использованию Arduino библиотеки SPI.
Так как SPI не является универсальным стандартом, некоторые производители устройств SPI могут по-разному называть линии связи SPI. Линию выбора ведомого иногда называют CS, линию синхронизации - CLK; контакты MOSI и MISO ведомых устройств называют входом последовательных данных (SDI) и выходом последовательных данных (SDO) соответственно.
Передача данных по SPI синхронизируется тактовым сигналом и зависит от состояния линий SS. Все команды, отправляемые мастером, проявляются на входах MOSI, MISO, SCLK всех ведомых устройств. Состояние контакта SS сообщает устройству, игнорировать эти данные или принимать. При написании программы следует учитывать, что при передаче данных только один контакт SS должен иметь низкий уровень.
Последовательность действий для связи с устройством SPI выглядит следующим образом:
1. У становить низкий уровень на линии SS устройства, с которым хотите установить связь.
2. Переключать на тактовой линии уровень сигнала вверх и вниз со скоростью, меньшей или равной скорости передачи, поддерживаемой ведомым устройством.
3. На каждом такте отправлять 1 бит данных по линии MOSI или получать 1 бит данных по линии MISO.
- 190 -
4. Продолжать, пока передача (или прием) не закончится, и остановить переключения тактовой линии.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Изучаем Arduino: инструметы и методы технического волшебства»
Представляем Вашему вниманию похожие книги на «Изучаем Arduino: инструметы и методы технического волшебства» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Изучаем Arduino: инструметы и методы технического волшебства» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.