Джереми Блум - Изучаем Arduino - инструметы и методы технического волшебства
Здесь есть возможность читать онлайн «Джереми Блум - Изучаем Arduino - инструметы и методы технического волшебства» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2015, ISBN: 2015, Издательство: БХВ-Петербург, Жанр: Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Изучаем Arduino: инструметы и методы технического волшебства
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2015
- Город:Санкт-Петербург
- ISBN:978-5-9775-3585-4
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Изучаем Arduino: инструметы и методы технического волшебства: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Изучаем Arduino: инструметы и методы технического волшебства»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для радиолюбителей
Изучаем Arduino: инструметы и методы технического волшебства — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Изучаем Arduino: инструметы и методы технического волшебства», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Мы рассмотрим, как с помощью источника 9 В и стабилизатора напряжения получить напряжение 5 В для питания сервопривода. Интегральный стабилизатор напряжения - чрезвычайно простое устройство, у которого обычно три контакта:
• вход;
• выход;
• заземление.
Заземляющий вывод соединен как с землей входного, так и с землей выходного напряжения. Для работы стабилизатора входное напряжение должно быть выше, чем выходное, причем величина выходного напряжения фиксирована в зависимости от типа стабилизатора.
Падение напряжения приводит к нагреву, поэтому необходимо позаботиться о теплоотводе (например, алюминиевом радиаторе). Для наших экспериментов возьмем 5-вольтовый стабилизатор напряжения L4940V5, который способен выдавать ток до 1,5 А. Схема включения стабилизатора приведена на рис. 4.11.101
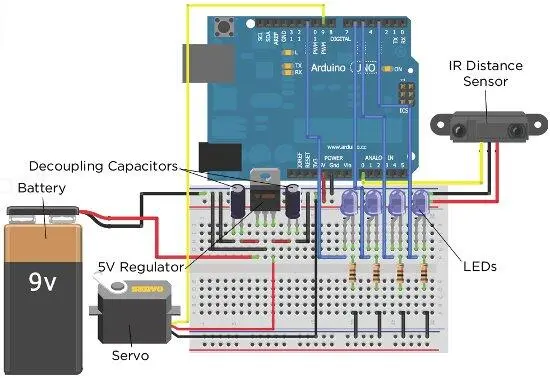
Рис. 4.11. Схема включения стабилизатора напряжения
Рис. 4.12. Схема подключения сервопривода
Потенциометр
- 102 -
Обратите внимание на конденсаторы на входе и выходе стабилизатора, они устраняют пульсации напряжения. Схема и номиналы конденсаторов подойдут для большинства типов стабилизаторов. Имейте в виду, что выход стабилизатора не нужно соединять с шиной 5 В платы Arduino. Соединить следует только шины земли стабилизатора и платы Arduino.
Пришло время подсоединить сервопривод. Сверяясь с монтажной схемой, подсоедините потенциометр к аналоговому входу A0, сигнальный вход сервопривода к цифровому входу 9 платы Arduino, убедитесь, что стабилизатор выдает напряжение 5 В. При соединении элементов обратите внимание на правильность подключения контактов стабилизатора и полярность включения конденсаторов (рис. 4.12).
Соединив все элементы, можно перейти к следующему разделу, чтобы узнать, как программировать контроллер сервопривода.
Разберемся, почему серводвигателю нужен внешний источник, если он работает, как и плата Arduino, от напряжения 5 В. При питании Arduino от USB для самой платы Arduino и подключенных к ней устройств максимально возможный ток равен 500 мА. В неподвижном положении сервоприводы потребляют малый ток. Но при выполнении команд сервоприводы потребляют ток в несколько сотен миллиампер, что приводит к скачкам напряжения. Кроме того, при недостаточном напряжении питания вал сервопривода перемещается неустойчиво. Поэтому для сервопривода необходим отдельный источник питания.
4.12. Контроллер серводвигателя
В Arduino IDE предусмотрена библиотека Servo для упрощения управления сервоприводами. Чтобы работать с библиотекой, необходимо подключить ее к нашей программе. Затем следует прикрепить объект Servo к определенному выводу Arduino и задать угол вращения. Обо всем остальном позаботится библиотека. Самый простой способ проверить функционирование сервопривода - управление позицией вала с помощью потенциометра. Значение 0 потенциометра соответствует повороту сервопривода на 0°, значение 1023 - повороту на 180°. Загрузите код, приведенный в листинге 4.6, в плату Arduino, чтобы проверить все в действии.
Листинг 4.6. Управление положением серводигателя с помощью потенциомера - servp.ino
// Управление положением серводвигателя с помощью потенциометра
#include
const int SERV0=9; // Вывод 9 для подключения сигнального провода сервопривода
const int POT=0;// Подключение потенциометра к аналоговому входу A0
Servo myServo;
int val = 0;// Переменная для чтения показаний потенциометра
void setup()
{
myServo.attach(SERV0);
}
- 103 -
void loop()
{
val = analogRead(POT);// Чтение данных потенциометра
val = map(val, 0, 1023, 0, 179); // Преобразование к нужному диапазону
myServo.write(val);// Установить положение сервопривода
delay(15);
}
Оператор include, указанный в начале программы, добавляет функционал библиотеки Servo. Оператор Servo myServo создает объект сервопривода с именем myservo.
В том месте программы, где требуется действие с сервоприводом, будет ссылка на объект myServo. В функции setup() вы инициализируете сервопривод, присоединяя его к контакту 9 Arduino. Можно подсоединить к Arduino несколько сервоприводов, создав несколько объектов Servo и назначив каждому свой контакт Arduino.
В цикле loop() считывается текущее значение потенциометра, масштабируется до диапазона значений сервопривода и формируется импульс для установки вала сервопривода в соответствующую позицию. Задержка на 15 мс гарантирует, что вал сервопривода фиксируется, прежде чем поступит новая команда.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Изучаем Arduino: инструметы и методы технического волшебства»
Представляем Вашему вниманию похожие книги на «Изучаем Arduino: инструметы и методы технического волшебства» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Изучаем Arduino: инструметы и методы технического волшебства» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.