Коллектив Авторов - Цифровой журнал «Компьютерра» № 88
Здесь есть возможность читать онлайн «Коллектив Авторов - Цифровой журнал «Компьютерра» № 88» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Прочая околокомпьтерная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Цифровой журнал «Компьютерра» № 88
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Цифровой журнал «Компьютерра» № 88: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Цифровой журнал «Компьютерра» № 88»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Статьи Мнения Интервью Терралаб Колумнисты Голубятня-Онлайн
OpenPilot: беспилотники по-опенсорсному (часть 2) Информатизация полетов: способна ли автоматика спасти от человеческих ошибок RMA: выйдет ли музыкальная отрасль из тупика? Денис Алексеев о трёхмерной печати в домашних условиях Поль Люсье о российской стратегии RIM Алексей Новодворский («АЛЬТ Линукс») о НПП Осенний IDF 2011: ультрабуки и Ivy Bridge Василий Щепетнёв: За лёгким хлебом Кивино гнездо: Фильмы нашего разума Кафедра Ваннаха: Планшет и десктоп Дмитрий Шабанов: Добиологический отбор Василий Щепетнёв: За лёгким хлебом – 2 Кафедра Ваннаха: Пираты в Берлине Александр Амзин: Об искусстве запобывания Василий Щепетнёв: За лёгким хлебом – 3 Дмитрий Вибе: С неба звёздочка упала Голубятня: Дорога дьявола ведет к колибри Голубятня: Оксфорд Парагон
Цифровой журнал «Компьютерра» № 88 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Цифровой журнал «Компьютерра» № 88», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Компьютерра
26.09.2011 - 02.10.2011
Статьи
OpenPilot: беспилотники по-опенсорсному (часть 2)
Опубликовано 28 сентября 2011 года
- Продолжение. Первую часть статьи можно прочитать здесь.
Значительные усилия и время разработчиков OpenPilot были потрачены на проектирование архитектуры системы, совершенно нетипичной для любительских проектов. Вместо быстрого решения сиюминутных задач проект был тщательно спроектирован с расчётом на долгосрочную перспективу. Результатом этого явилась уникальная внутренняя организация, невидимая снаружи, но очень упрощающая жизнь разработчикам и, что более важно, позволяющая использовать достижения проекта для быстрого его расширения или даже для использования в других подобных разработках.
Во-первых, это собственный уровень аппаратной абстракции, названный PilotOS, или, сокращённо, PiOS. Он находится между конкретным «железом» и остальной логикой системы. Используя его и переносимый исходный код проекта, стало возможным не только легко адаптировать проект под разные типы процессоров, но даже собрать версию для персонального компьютера. Так получились HiTL – Hardware in The Loop и SiTL – Software in The Loop.
Отладка алгоритмов стабилизации OpenPilot в симуляторе FlightGear (видео Дмитрия Зайцева)
Говоря простыми словами, с помощью специального модуля GCS, умеющего общаться с программными симуляторами полёта, например игровым симулятором IL2, система может получать данные о самолёте не от платы INS с реальными датчиками, а от симулятора, работающего на том же компьютере, что и GCS, или на соседнем, подключённом по локальной сети или даже через интернет. Далее GCS направляет эти данные по каналу телеметрии в плату OP Pro, которая выполняет функции навигации и выдаёт управляющие воздействия не только на свои выходы, но и обратно в GCS. Последняя передает их в симулятор, который ведёт самолёт под управлением реального «железа» проекта OpenPilot. Это и есть HiTL – реальная электроника управляет симулированным самолётом.
Но это ещё не всё. Скомпилировав тот же программный код с заменой одного только уровня PiOS, можно получить программу стабилизации, работающую на том же персональном компьютере. Теперь вся система вообще становится виртуальной: симулятор самолёта, GCS и код системы навигации работают на PC, не требуя специальных плат. Это даёт возможность отлаживать любые алгоритмы навигации вообще без железа и без рисков разбить модель на ранней стадии отладки. Такой уникальной возможностью не может похвастаться ни один из существующих на сегодня любительских проектов.
Второе принципиальное архитектурное решение — это протокол обмена данными, названный UAVTalk. Все данные в системе, будь то настройки или данные управления и состояния, представлены в виде так называемых uavobjects – объектов, знающих о себе всё: тип данных, количество элементов, значения по умолчанию, допустимый диапазон значений и так далее. Весь обмен информацией как внутри системы, так и между моделью и землёй, построен на основе этих объектов.
UAVobjects, описанные на XML, автоматически преобразуются в исходные тексты на C для «прошивки» и C++ для GCS
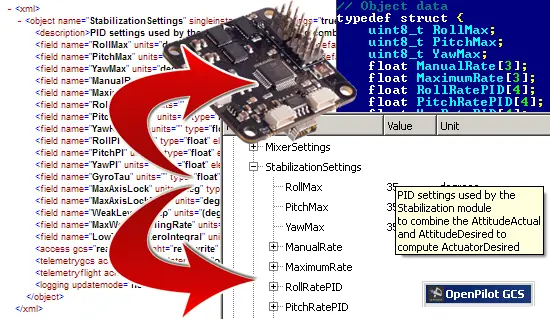
Что это даёт? Во-первых, каждый объект описан в одном месте. Изменение объекта приводит к изменению во всех частях системы, что устраняет возможность ошибок по забывчивости. Во-вторых, все эти объекты автоматически становятся доступны GCS для просмотра или изменения. В-третьих, они сами докладывают о себе в двух направлениях по каналам телеметрии с заданной периодичностью или по факту своего изменения. В-четвёртых, благодаря этому протоколу стала возможной реализация подключения к симуляторам или управления с земли с помощью компьютера: достаточно установить для объекта запрет обновления со стороны платы сенсоров, и мы можем заполнять эти значения данными из симулятора. Остальная часть системы даже не узнает, что источник данных изменился.
И, наконец, UAVTalk — открытый протокол. Его реализация существует уже на языках программирования C, C++, Python, Java, есть версия для пакета Matlab. Достаточно реализовать формально описанный протокол на новом устройстве, и появляется возможность взаимодействовать как с GCS, так и с моделью на основе OpenPilot.
В то время как другие проекты предлагают приобрести специальные программаторы или адаптеры для выполнения настроек (не говоря уже о самых примитивных, где все настройки ограничиваются парой «крутилок» под отвёртку), в проекте OpenPilot этому также уделено особое внимание. Достаточно подключить систему к компьютеру обычным USB кабелем, как будут автоматически установлены нужные драйверы и при запущенной GCS можно будет немедленно приступить к конфигурированию системы.
Читать дальшеИнтервал:
Закладка:
Обсуждение, отзывы о книге «Цифровой журнал «Компьютерра» № 88» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.