Андрей Робачевский - Операционная система UNIX
Здесь есть возможность читать онлайн «Андрей Робачевский - Операционная система UNIX» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 1997, ISBN: 1997, Издательство: BHV - Санкт-Петербург, Жанр: ОС и Сети, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Операционная система UNIX
- Автор:
- Издательство:BHV - Санкт-Петербург
- Жанр:
- Год:1997
- Город:Санкт-Петербург
- ISBN:5-7791-0057-8
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Операционная система UNIX: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Операционная система UNIX»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В книге рассматриваются: архитектура ядра UNIX (подсистемы ввода/вывода, управления памятью и процессами, а также файловая подсистема), программный интерфейс UNIX (системные вызовы и основные библиотечные функции), пользовательская среда (командный интерпретатор shell, основные команды и утилиты) и сетевая поддержка в UNIX (протоколов семейства TCP/IP, архитектура сетевой подсистемы, программные интерфейсы сокетов и TLI).
Для широкого круга пользователей
Операционная система UNIX — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Операционная система UNIX», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Рассмотрим следующие команды:
$ find / -name foo &
$ cat | sort
При этом происходит чтение ввода пользователя с клавиатуры ( cat(1) и сортировка введенных данных ( sort(1) ). Если интерпретатор поддерживает управление заданиями, оба процесса, созданные для программ cat(1) и sort(1) , будут помещены в отдельную группу. Это подтверждается выводом команды ps(1) :
$ ps -efj | egrep "PID|andy"
UID PID PPID PGID SID С STIME TTY TIME CMD
andy 2436 2407 2435 2407 1 15:51:30 tty01 0:00 sort
andy 2431 2407 2431 2407 0 15:51:25 tty01 0:00 find / -name foo
andy 2407 2405 2407 2407 0 15:31:09 tty01 0:00 -sh
andy 2435 2407 2435 2407 0 15:51:30 tty01 0:00 cat
Все четыре процесса (sh, find, cat и sort) имеют один и тот же идентификатор сеанса, связанного с управляющим терминалом tty01. Процессы cat(1) и sort(1) принадлежат одной группе, идентификатор которой (2435) отличен от идентификатора группы командного интерпретатора (2407). То же самое можно сказать и о процессе find(1) , который является лидером отдельной группы (2431). Можно также заметить, что процессы sh(1) , find(1) и cat(1) являются лидерами групп, a еще sh(1) и лидером сеанса.
Хотя команда ps(1) не указывает, какие группы являются фоновыми, а какая текущей, синтаксис команд позволяет утверждать, что командный интерпретатор помещает cat(1) и sort(1) в текущую группу. Это, во-первых, позволяет процессу cat(1) читать данные со стандартного потока ввода, связанного с терминалом tty01. Во-вторых, пользователь имеет возможность завершить выполнение обоих процессов путем нажатия клавиши < Del > (или < Ctrl >+< C >), что вызовет генерацию сигнала SIGINT. Получение процессами этого сигнала вызовет завершение их выполнения (действие по умолчанию), если, конечно, процесс не установил игнорирование SIGINT. На рис. 2.13. представлена схема взаимодействия управляющего терминала, сеанса и групп процессов для приведенного выше примера. Более детально взаимосвязь между терминалом и процессами рассмотрена в следующей главе.
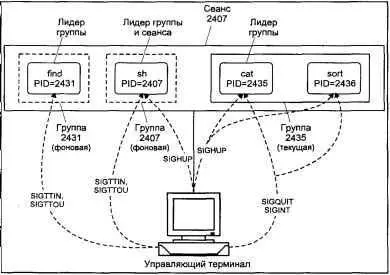
Рис. 2.13. Связь между управляющим терминалом, сеансом и группами
Если командный интерпретатор не поддерживает управление заданиями, оба процесса станут членами той же группы, что и сам shell. В этом случае командный интерпретатор должен позаботиться об игнорировании сигналов SIGINTи SIGQUIT, чтобы допустимые действия пользователя (такие как нажатие клавиши < Del > или < Ctrl >+< C >) не привели к завершению выполнения shell и выходу из системы.
Ограничения
UNIX является многозадачной системой. Это значит, что несколько процессов конкурируют между собой при доступе к различным ресурсам. Для "справедливого" распределения разделяемых ресурсов, таких как память, дисковое пространство и т.п., каждому процессу установлен набор ограничений. Эти ограничения не носят общесистемного характера, как, например, максимальное число процессов или областей, а устанавливаются для каждого процесса отдельно. Для получения информации о текущих ограничениях и их изменения предназначены системные вызовы getrlimit(2) и setrlimit(2) :
#include
#include
int getrlimit{int resource, struct rlimit *rlp);
int setrlimit(int resource, const struct rlimit *rlp);
Аргумент resourceопределяет вид ресурса, для которого мы хотим узнать или изменить ограничения процесса. Структура rlimitсостоит из двух полей:
rlim_t rlim_cur;
rlim_t rlim_max;
определяющих, соответственно, изменяемое (soft) и жесткое (hard) ограничение. Первое определяет текущее ограничение процесса на данный ресурс, а второе — максимальный возможный предел потребления ресурса. Например, изменяемое ограничение на число открытых процессом файлов может составлять 64, в то время как жесткое ограничение равно 1024.
Любой процесс может изменить значение текущего ограничения вплоть до максимально возможного предела. Жесткое ограничение может быть изменено в сторону увеличения предела потребления ресурса только процессом с привилегиями суперпользователя. Обычные процессы могут только уменьшить значение жесткого ограничения. Обычно ограничения устанавливаются при инициализации системы и затем наследуются порожденными процессами (хотя в дальнейшем могут быть изменены).
Вообще говоря, максимальный возможный предел потребления ресурса может иметь бесконечное значение. Для этого необходимо установить значение rlim_maxравным RLIM_INFINITY. В этом случае физические ограничения системы (например, объем памяти и дискового пространства) будут определять реальный предел использования того или иного ресурса.
Интервал:
Закладка:
Похожие книги на «Операционная система UNIX»
Представляем Вашему вниманию похожие книги на «Операционная система UNIX» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Операционная система UNIX» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.