Михаил Бармин - Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач
Здесь есть возможность читать онлайн «Михаил Бармин - Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Издательство: Литагент Selfpub.ru (искл), Жанр: samizdat, Детская образовательная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач
- Автор:
- Издательство:Литагент Selfpub.ru (искл)
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Так, например, гладкая поверхность (без трения) является для тела геометрической связью, а шероховатая (с трением) – дифференциальной (Р.
S
. – в ч.
I
, статике, эти связи назывались соответственно идеальными и связями с трением).
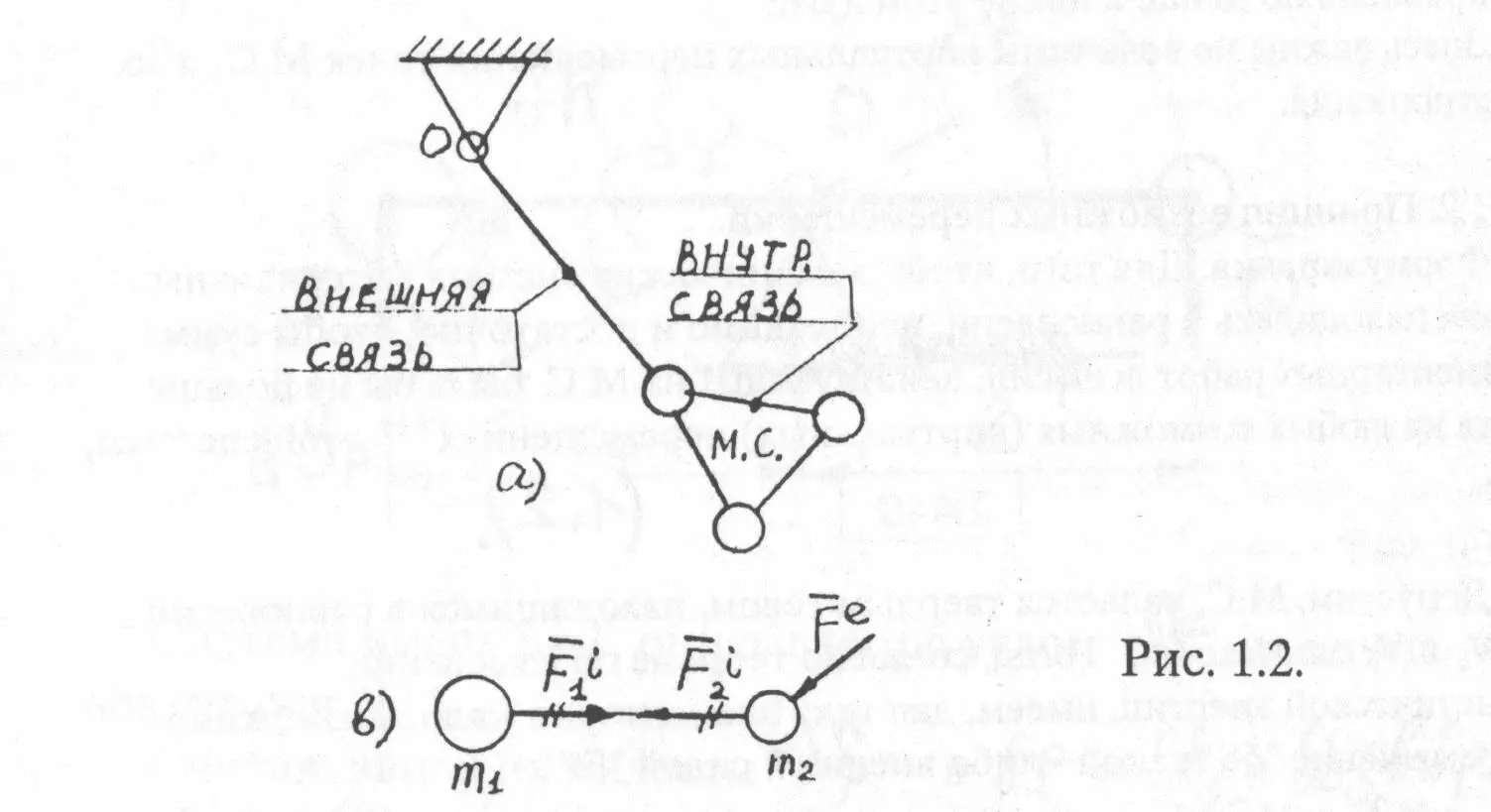
Связи, наложенные на М.С. могут быть внешними, действующими извне на М.С.и внутренними, связывающими М.Т. внутри системы (Рис. 1.2.А)
Если на систему наложены внешние связи, то она считается несвободнойи число ее степеней свободы S<6.
Силы, действующие на М.С. могут быть как внешними () так и – внутренними силами взаимодействия между точками внутри системы () (Рис. 1.2.),
По аксиоме динамики, изложенной в ч. III конспекта, всякому действию соответствует равное и противоположно направленное противодействие.Согласно этой аксиоме(Рис.1.2,в) силы = – и + Распространяя это на любое число “ n ”точек М.С. приходим к выводу, что главный вектор внутренних сил любой М.С. равен нулю, т.е.:
(1.1)
Этим важным свойством внутренних сил мы будем пользоваться очень часто в дальнейшем.
Точки М.С. в их движении под действием как внешних, так и внутренних сил совершают эти перемещения в зависимости от вида внешних и внутренних связей, на них наложенных. Число таких возможных (виртуальных) перемещений всегда равно числу “S” степеней свободы рассматриваемой механической системы.
Виртуальные перемещения точек М.С. можно взять бесконечно малыми и оценивать их соотношения исходя из того, что, например, хорда, стягивающая дугу реальной криволинейной траектории точки, может быть приравнена по длине к длине этой дуги.
Здесь важны не величины виртуальных перемещений точек М.С., а их соотношения.
1.2. Принцип возможных перемещений.
Формулировка.Для того, чтобы механическая система материальных точек находилась в равновесии, необходимо и достаточно, чтобы сумма элементарных работ всех внешних сил, действующих на М.С. была бы не больше нуля на любых возможных (виртуальных) перемещениях “S” этой системы, т.е.
(1.2)
Допустим, М.С. является твердым телом, находящимся в равновесии ( и одинаковы). Тогда, согласно теореме об изменении кинетической энергии, имеем, дав телу элементарно малое возможное перемещение “” какой—либо внешней силой “”
, но и
Если тело поместить на плоскость с трением (), то при перемещении тела по этой плоскости
Объединив эти соображения, имеем (1.3)
В выражении 1.3. принципа возможных перемещений (П.В.П.) S=1S—число степеней свободы системы, равное числу возможных (виртуальных) её перемещений, допускаемых наложенными на М.C. связями.
Пример на П.В.П.:Балка АВ находится в равновесии под действием сил и . Плечи сил”а” и “ b” известны. Каково должно быть соотношение сили , т. е. Р = F(Q)=? (Рис. 1.3).
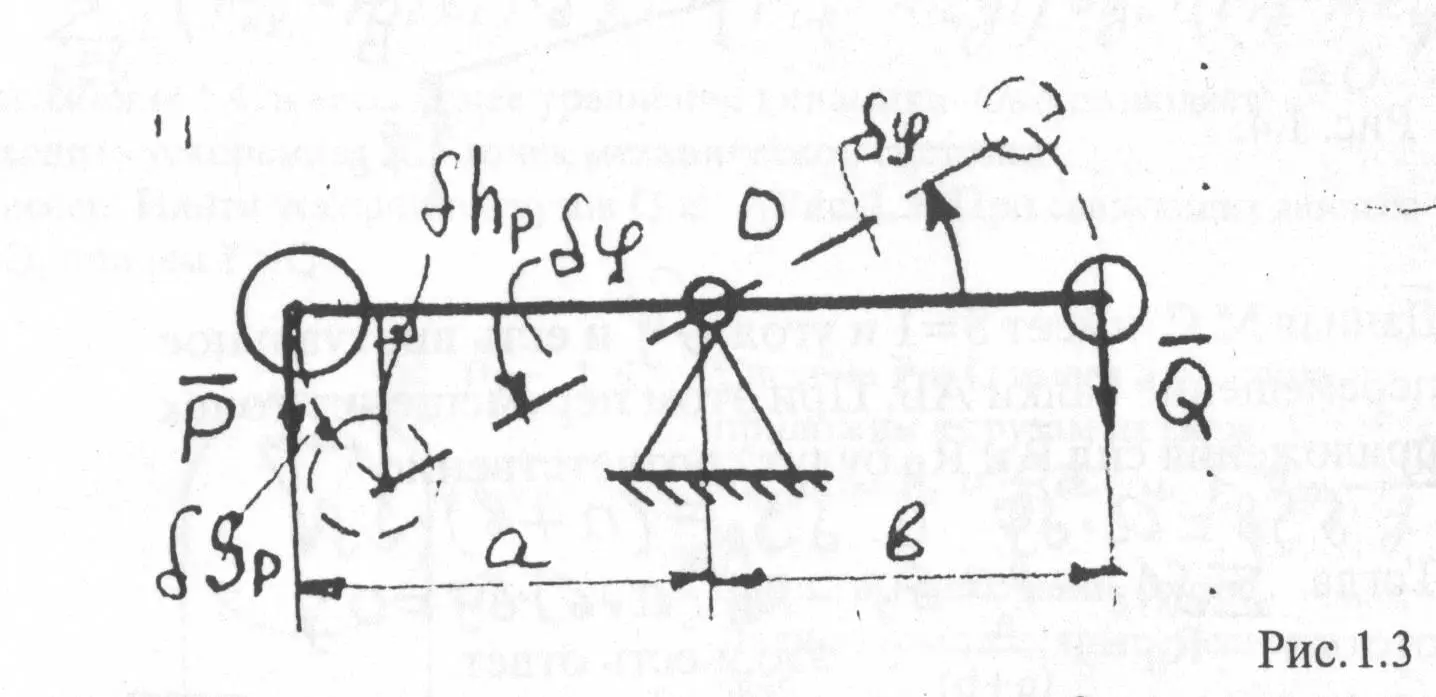
Система имеет S=1, описываемое углом “” поворота вокруг оси “O”. Считая, ввиду их малости ““= и ,
Определим
Отсюда . Это ответ.
Применим П.В.П. К задачам статики. Там тело изначально находится в равновесии, т.е. заведомо.
Пример:
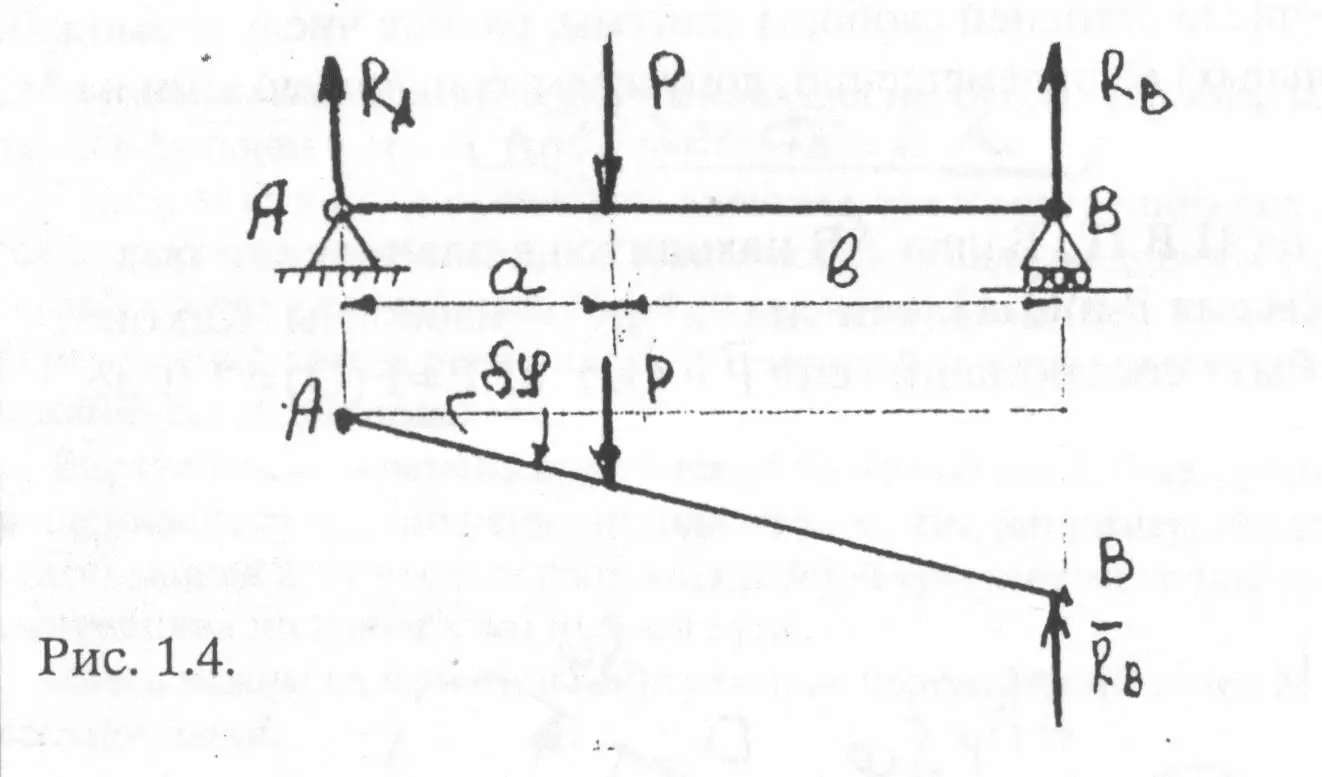
Определить реакцию балки АБ при следующих
данных: Р, а,
b
. (Рис.1.4.
)
Данная М.С. имеет S=1 и угол и есть виртуальное перемещение балки АВ. При этом перемещение точек приложения сил и будут соответственно
и . Тогда отсюда ; это и ответ.
Р.S.: Решая задачу методами статики, имеем: т.е..
Так что задачи статики можно решать и П.В.П.
1.3. Принцип Даламбера и общее уравнение динамики механической системы и твердого тела.
Формулировка принципа Даламбера:
Если к каждой точке механической системы с двухсторонними связями помимо сил, на них действующих, приложить еще и силу инерции (), то все силы, действующие на все точки М.С. будут взаимно уравновешенны и к такой, уже уравновешенной системе сил, можно применить все законы статики,а также и П.В.П.
При этом .
Спроектировав на оси декартовой системы координат выражение 1.4, имеем:
(1.4).
Выражение 1.4. и есть общее уравнение динамики. Оно позволяет
находить ускорения “” точек механической системы.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач»
Представляем Вашему вниманию похожие книги на «Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Теоретическая механика. Часть 4. Динамика системы материальных точек и твердого тела с решениями задач» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.