Алексей Лепихов - Scavenger. Космический мусор
Здесь есть возможность читать онлайн «Алексей Лепихов - Scavenger. Космический мусор» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. ISBN: , Жанр: Публицистика, Справочники, Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Scavenger. Космический мусор
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:9785005110886
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Scavenger. Космический мусор: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Scavenger. Космический мусор»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Scavenger. Космический мусор — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Scavenger. Космический мусор», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В зависимости от применяемых методов и принципов работы наблюдаются либо существенные погрешности измерений, либо отсутствие возможностей:
– измерения в полном диапазоне (например, дальние и близкие «дальности» одновременно);
– комплексное наблюдение всех факторов загрязнений;
– одновременное наблюдение за группами объектов КМ, за объектами различных размеров, с разными скоростями и параметрами орбит;
– наблюдения в реальном времени (маркировка для опознавания, фиксация параметров, изменения параметров);
– обнаружение всех объектов, включая самые мелкие (в зависимости от методов обнаружения и отдалённости делятся: до 1—2 мм, до 1 см, до 10 см и больше).
С учётом перечисленных недостатков существующий мониторинг позволяет создавать только математические модели части объектов КМ и только прогнозировать их поведение, то есть отслеживать не в реальном времени.
Проблема: не предложен достаточно надёжный способ маркировки объектов КМ и обмена данными между ними и анализирующими устройствами.
Одним из способов слежения за движущимися наземными объектами является их маркировка. Например, на животных устанавливают окольцовку и GPS-передатчики, за людьми наблюдают видео- и фотокамеры, повсеместно применяются электронные и магнитные штрихкоды, радиолокация используется в военных и промысловых целях.

Каждый способ, особенно в космических условиях, имеет недостатки: невозможность измерения всех факторов загрязнения одновременно; нереальная или дорогостоящая установка на объекты, движущиеся с огромной скоростью и имеющие небольшие размеры; недостаточный объём получения данных об объектах; отсутствие слежения в реальном времени; проблемы энергопотребления.
На Земле для точных измерений чаще применяются активные методы радиолокации, но в космических условиях это значительный расход электроэнергии.
При использовании пассивных методов сигналы подвергаются целому ряду искажающих помех, а собственный фон объектов (электромагнитный, инфракрасный и др.) должен быть достаточным для обнаружения. В условиях космоса эхолокация вообще отпадает.
Результаты наблюдений наземных станций заносятся в специальные каталоги космического мусора, но параметры КМ постоянно меняются, и отследить их с Земли в реальном времени невозможно.

По математическому моделированию написано множество трудов, но в настоящее время им не находится практического применения.
Проблема: не существует реальных наземных и космических систем, способных удалять космический мусор.
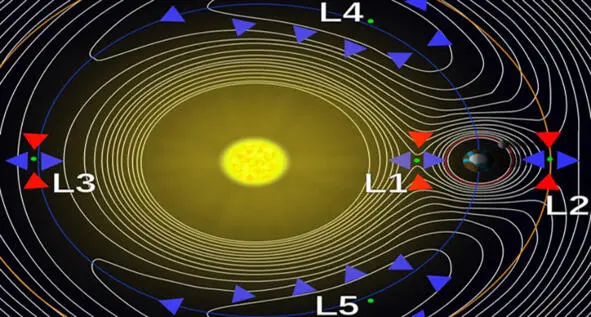
В настоящий момент идут обсуждения методов ликвидации КМ: складирование в точках Лагранжа, перевод объектов на орбиты захоронения (для самоуправляемых АС) и увод в космическое пространство, уничтожение на месте, торможение атмосферой.
Спутниковые системы стараются располагать на энергосберегающих орбитах, в зонах, откуда они отслеживают («покрывают») требуемые территории Земли или решают другие задачи (например, экономия топлива при выводе на экваториальную орбиту). Постепенно ощущаться нехватка мест для новых систем, наблюдение космоса с Земли затруднено.
Некоторые системы помещают в точки Лагранжа для энергосберегающего маневрирования. Там же скапливается и дрейфующий рядом КМ. Возникает дилемма: складировать космический мусор в точках Лагранжа или расчищать их для энергосберегающего использования спутниками.
Увод КМ к орбитам захоронения или в дальний космос сопровождается большим расходом топлива. Самоуправляемых систем мало, и не на всех предусмотрен запас топлива. Договорённость космических держав о создании безопасных самоуводящихся и самоликвидирующихся систем находится в стадии обсуждения.
Коротко о представленных в интернет разработках
Наиболее реальные тягачи для транспортировки КМ построены по принципу солнечного паруса и использования геомагнитного поля Земли. Проблема захвата обломков не решена, полёт не контролируем, скорость черепашья.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Scavenger. Космический мусор»
Представляем Вашему вниманию похожие книги на «Scavenger. Космический мусор» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

![Роберт Хайнлайн - Космический патруль [=Космический кадет]](/books/333392/robert-hajnlajn-kosmicheskij-patrul-kosmicheskij-thumb.webp)
Обсуждение, отзывы о книге «Scavenger. Космический мусор» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.