Александр Фролов - Робототехника - практическое введение для детей и взрослых
Здесь есть возможность читать онлайн «Александр Фролов - Робототехника - практическое введение для детей и взрослых» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 2021, ISBN: 2021, Жанр: Прочая детская литература, Детская образовательная литература, Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Робототехника: практическое введение для детей и взрослых
- Автор:
- Жанр:
- Год:2021
- ISBN:978-5-532-95281-2
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Робототехника: практическое введение для детей и взрослых: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Робототехника: практическое введение для детей и взрослых»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Робототехника: практическое введение для детей и взрослых — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Робототехника: практическое введение для детей и взрослых», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
,Кроме всего этого, наш ровер будет отправлять в пульт управления телеметрические данные – температуру процессора и окружающей среды, давление, влажность, освещенность и температуру точки росы. Эти данные мы будем выводить на OLED-монитор, смонтированный в пульте управления.
В главе 15 «Электропитание робота»рассказано о том, какие существуют батарейки и аккумуляторы, как выбрать нужный тип питающих элементов для вашего робота. Будут рассмотрены особенности работы и зарядки аккумуляторов разных типов, применения контроллеров заряда и разряда Battery Management System (BMS).
Также вы узнаете, как использовать преобразователи и стабилизаторы для устройств, которым нужно разное напряжение питания, как подключать аккумуляторы и батарейки к макетной плате и устройствам робота с помощью отсеков и переходников, как питать робота от электрической сети 220 В на этапе отладки.
В главе 16 «Дальняя радиосвязь»рассмотрено использование технологии LoRa для создания каналов радиосвязи, способных передавать данные на большие расстояния, порядка километров и даже больше. При этом используются недорогие платы micro:bit и модули LoRa производства компании EBYTE.
Вы соберете погодную станцию, способную передавать информацию о температуре, давлении, влажности и температуре точки росы через канал дальней радиосвязи.
Вы также сделаете ретранслятор данных от сервера погодной станции, удваивающий максимальное расстояние передачи данных.
Глава 17 «Умный дом своими руками»содержит краткое введение в технологии умного дома. Мы расскажем о том, как использовать micro:bit и Raspberry Pi для сбора различных данных (о погоде, например) на обширной территории. Это может быть загородная резиденция или даже территория фабрики.
Почти в каждой главе предусмотрены домашние задания. Работая над ними самостоятельно, вы не только сможете проверить и закрепить свои знания. Решения домашних заданий вы сможете найти на сайте автора этой книги.
Исходные коды программ
Исходные коды всех программ, опубликованных в книге, вы можете скачать на сайте автора http://frolov-lib.ru/books/boxrover/, а также на GitHub https://github.com/AlexandreFrolov/BoxRover.
Свои пожелания, замечания и предложения вы можете оставить в группе по адресу https://www.facebook.com/groups/539933346894981/, а также отправить по электронной почте на адрес microbit@frolov.pp.ru.
Введение
Каждый день вы используете различную технику, даже не задумываясь о том, что в ней есть встроенные микрокомпьютеры. Вещи, которыми мы пользуемся в обиходе, становятся все более интеллектуальными.
Робот-пылесос в процессе уборки сам обследует квартиру, составляя ее карту, сам возвращается на пункт подзарядки, и сообщает о своих действиях голосом. Роботы моют окна, работают на выставках и барах, управляют автомобилями, используются в боевых действиях и в борьбе с терроризмом.
Новостные сайты в интернете забиты статьями о том, что скоро роботы начнут отнимать работу у людей, вытесняя их из ряда профессий, в том числе не требующих высокой квалификации. С этим можно спорить, однако несомненно, что робототехника уже прочно вошла в нашу жизнь, и специалисты в этой области будут всегда востребованы.
Но с чего лучше всего начинать обучение программированию и робототехнике?
Можно условно выделить два подхода к обучению.
Первый подход предполагает изучение основ электроники, компьютерной техники, программирования на ассемблере и Си, с последующим переходом к более высокоуровневым средствам проектирования программ и схемотехническим решениям на базе современных процессоров и микроконтроллеров, обучения основам численных методов и дискретной математики.
Когда-то давным-давно был доступен только первый способ, и я сам обучался именно так. Я собирал приемники-передатчики на транзисторах и лампах, различные радио устройства, триггеры из транзисторов, регистры из элементов 2И-НЕ на базе К155ЛА3, электронные часы, частотомер и самодельные компьютеры на микросхеме КР580ВМ80А, добавляя россыпь логических микросхем, микросхем памяти и периферийных устройств (рис. В.1). Первые программы были написаны, конечно же, в машинных кодах!
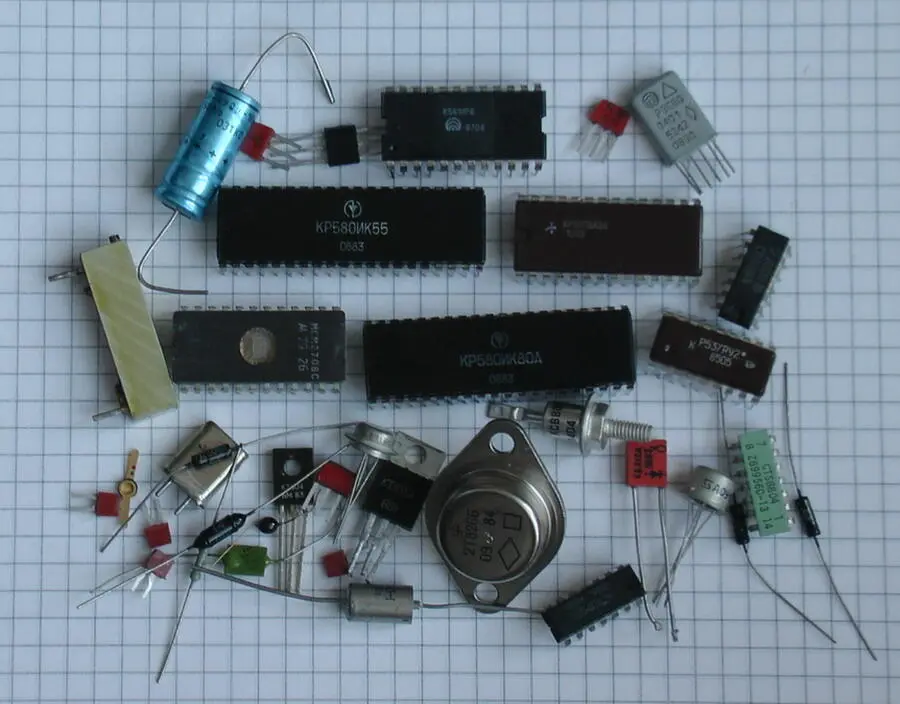
Рис. В.1. Элементная база прошлого века
У этого подхода есть очевидные преимущества и не менее очевидные недостатки.
Из важных преимуществ – на любом этапе будет понятна суть происходящего на самом низком уровне, на уровне сигналов и команд процессора, на уровне элементов и микросхем. Понимание сложных вещей будет достигаться постепенно, по мере продвижения от простого к сложному.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Робототехника: практическое введение для детей и взрослых»
Представляем Вашему вниманию похожие книги на «Робототехника: практическое введение для детей и взрослых» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Робототехника: практическое введение для детей и взрослых» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.